RGB相机动捕系列:相机标定(二、标定计算)
**RGB相机动捕系列:相机标定(二、标定计算)
一、概述
在上一篇博客中我们讲了相机标定的前置步骤,特征提取,本篇讲述后续的多相机标定中的标定计算部分;主要包括:1、匹配关联;2、几何验证;3、全局优化
二、标定计算
2.1、匹配关联
红点提取完成后,可能存在同一时刻同一相机提取出了多个红点或者未提取到红点,则认为该帧为无效帧,将该帧删除,最后将有效帧进行两两匹配,构建相机-特征匹配关系。
2.2、几何验证
匹配关系构建完成后,需要去除误匹配,通过求解基础矩阵F和本质矩阵E进行几何验证(最后一次使用E矩阵),具体方法:首先根据2.1中得到的匹配关系求解基础矩阵F,常见的使用8点法求解基础矩阵,但由于噪声、误匹配等原因使用8点法求解基础矩阵不稳定,由于环境是人在动捕室中持续挥杆采集,以30帧的速度采集4分钟有7200帧,在实际使用中采集4分钟后经过上述2.1的匹配关联后最小的匹配对数量也大于500对,所以由于数据量充足,采用RANSAC(随机采样一致性)对基础矩阵进行估计,可以有效降低误匹配带来的误差。
2.3、全局优化
随着图像的不断增加,误差会不断累积,导致最后误差过大,将上述2.2中经过几何验证后的点进行全局优化消除误差。几何验证的匹配点对确保都是正确匹配,假设有N帧图像系列(每帧图像系由M个相机采集到的图像组成,假设每帧图像系列都有多个视图采集才标记点),于是最后的优化方程可以写成:
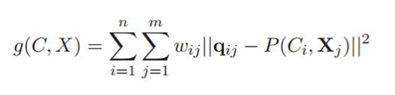
当摄像机i观察到轨迹j的时候Wij取1,反之取0,
||qij- P (Ci, Xj)||就是摄像机i中的轨迹j的投影误差累积和。
P(Ci, Xj),表示第j个三维点投影到相机i;
最优优化的输出结果包括N个三维点的坐标,以及M个相机的内外参数;
全局优化完成后,通过多次迭代上述2.3过程精确求解出相机的内外参。具体算法可以使用openMVG库实现。
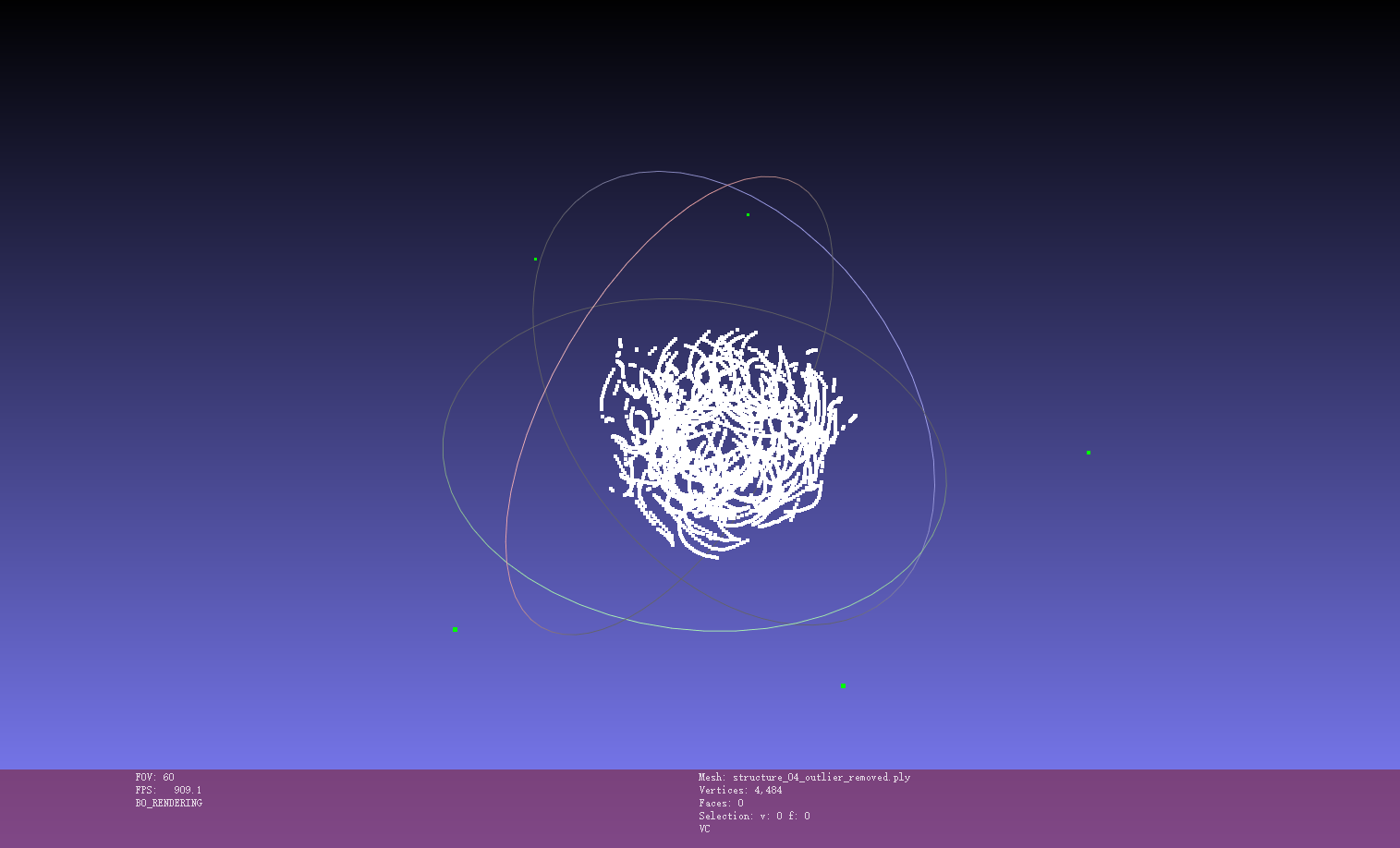
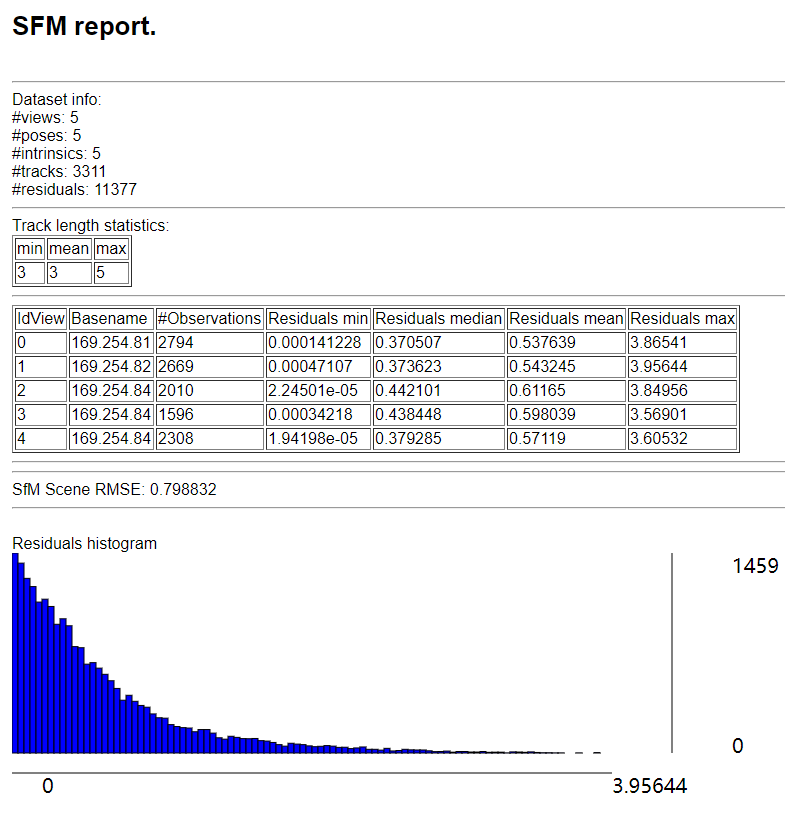
下面是使用5相机标定的结果和报告,可以看出标定精度非常高,误差为0.8像素。
标定结果如图:
标定报告:
AC_RANSAC参考:
[http://www.ipol.im/pub/art/2012/mmm-oh/)
SFM参考:
[https://github.com/openMVG/openMVG/wiki)
上一篇:
[https://suntfly.github.io/2024/01/05/RGB%E7%9B%B8%E6%9C%BA%E5%8A%A8%E6%8D%95%E7%B3%BB%E5%88%97%EF%BC%9A%E7%9B%B8%E6%9C%BA%E6%A0%87%E5%AE%9A%EF%BC%88%E4%B8%80%E3%80%81%E7%89%B9%E5%BE%81%E6%8F%90%E5%8F%96%EF%BC%89/)
注。1
本文仅供学习参考,未经允许,拒绝转载或者用作他用。