RGB相机动捕系列:相机标定(三、相机阵配准)
**RGB相机动捕系列:相机标定(三、相机阵配准)
一、概述
在上一篇博客中我们讲了相机标定的标定计算部分。但是完成标定的相机阵的参数在尺度、原点、方向上都和真实的坐标系有区别,所以需要使用配准的方式对相机参数进行变换,还原出真实的坐标系。
二、相机阵配准
2.1、配准杆
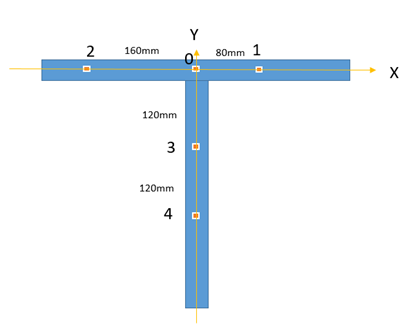
配准杆采用T字形红光灯,具体做法是将T形杆放置在地面并保持水平。T形杆如下图所示。
2.2、配准杆红点检测
水平放置配准杆后打开所有相机采集一张图像,并使用RGB相机动捕系列:相机标定(一、特征提取)这篇文章 ,链接
的红点提取方法对数据进行提取,下面是选取的3相机提取出来的红点示意图

2.3、红点三维重建
使用标定的相机参数重建T形杆的3D点。由于场景中需要重建的点较少,可以使用暴力重建方法直接重建3D数据。具体做法是:对特征数据进行两两匹配,通过相机内外参求解出基础矩阵,根据基础矩阵和极线的关系可筛选出满足条件的2D关系点,2D通过三角测量重建重建出3D点,最后利用2D点和3D点的关系融合3D点,得到最终需要的3D数据。这一部分后面我会单独写一篇博客进行说明,感兴趣的请随时关注。
2.4、配准
使用将原始坐标系的T字形标定杆与目标坐标系配准,再变换原始坐标系参数。下面是配准前后的相机阵和配准杆示意图。第一张图和第二张图中黄色的点为相机阵配准前的位置,分布在【0,1】空间。红色点为T形杆。第三张图绿色点为配准后的相机阵,红色点为配准杆。可以看出配准后相机参数已经还原到了真实坐标系的参数。配置算法使用最小费用最大流算法,将标准T形杆作为源点,测量得到的数据作为汇点,两点的距离作为费用。
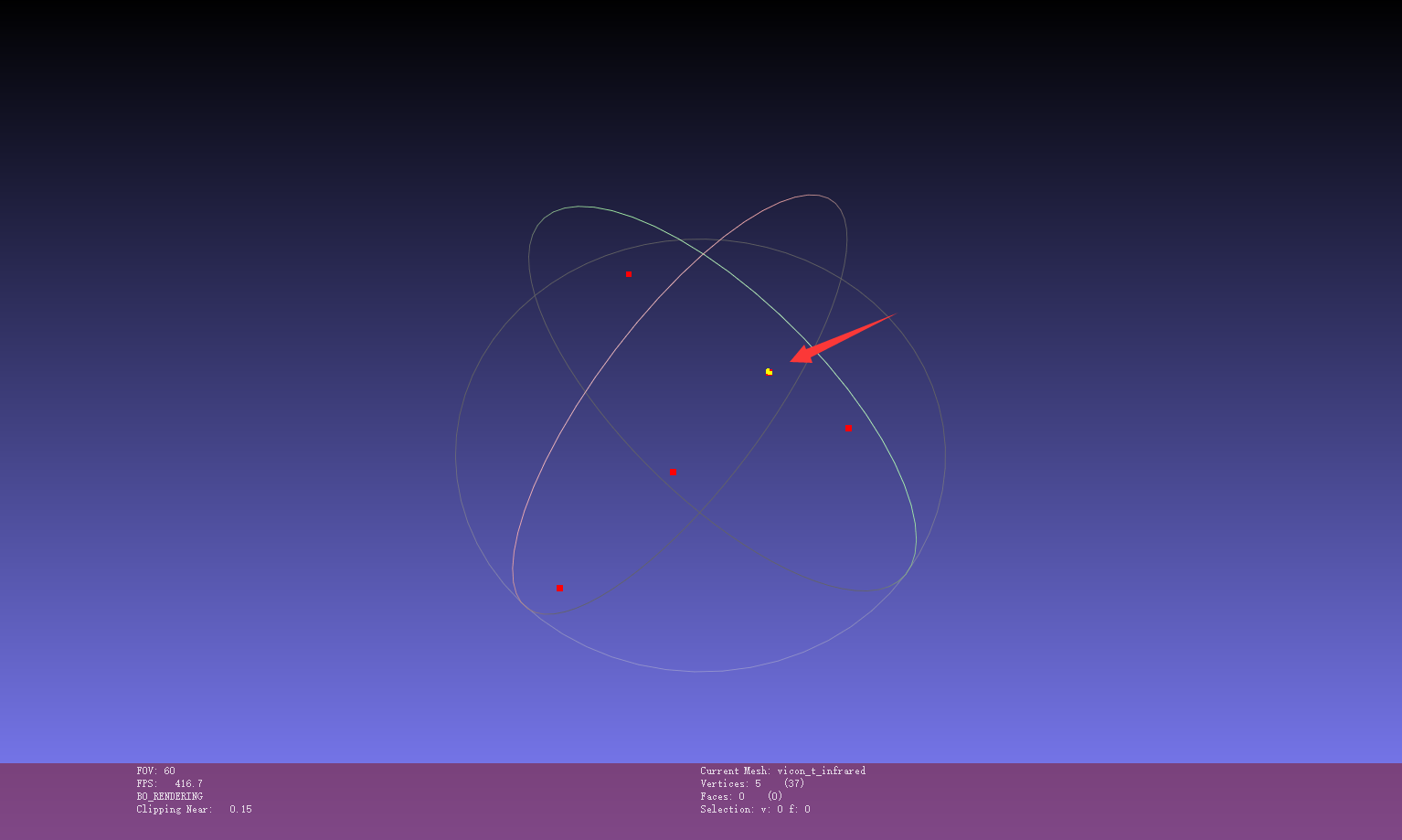
配准前相机阵和配准杆
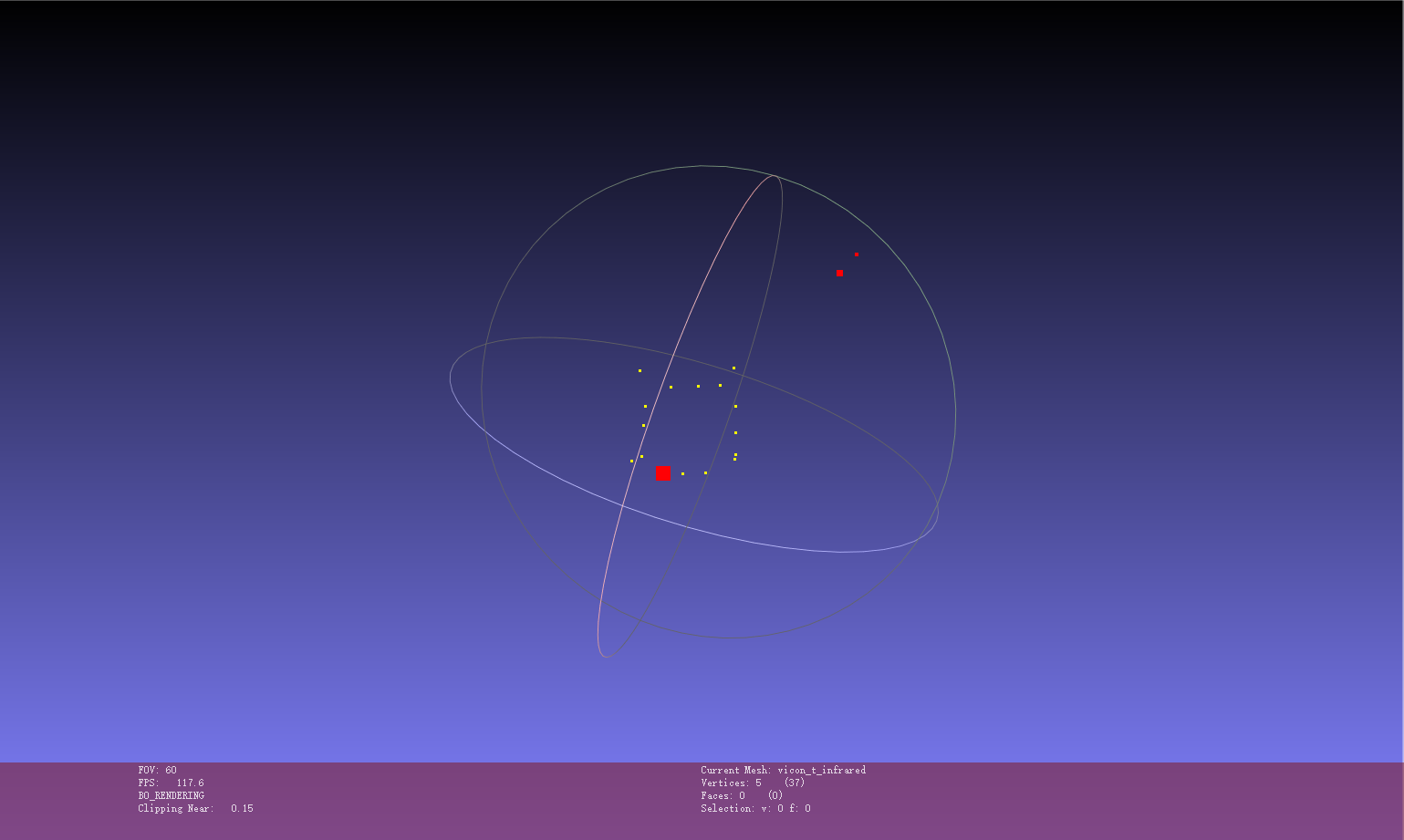
配准前相机阵和配准杆放大
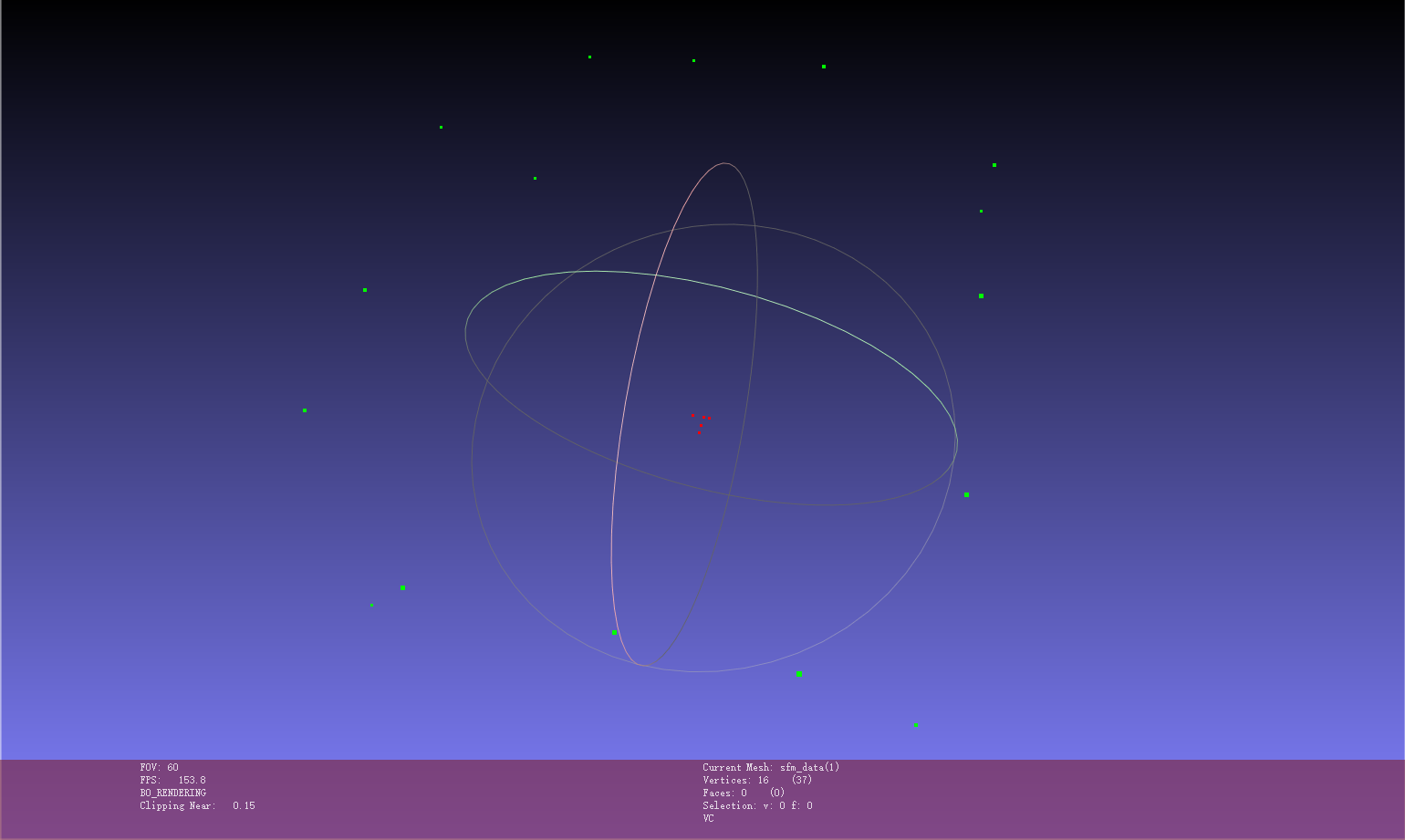
配准后相机阵和配准杆
注。1
本文仅供学习参考,未经允许,拒绝转载或者用作他用。
RGB相机动捕系列:相机标定(三、相机阵配准)
http://example.com/2024/01/22/RGB相机动捕系列:相机标定(三、相机阵配准)/